Differentiable blocks world: qualitative 3D decomposition by rendering primitives
This example is a visual walkthrough of the paper "Differentiable Block Worlds". All the visualizations were created by editing the original source code to log data with the Rerun SDK.
Visual paper walkthrough visual-paper-walkthrough
Finding a textured mesh decomposition from a collection of posed images is a very challenging optimization problem. "Differentiable Block Worlds" by Tom Monnier et al. shows impressive results using differentiable rendering. Here we visualize how this optimization works using the Rerun SDK.
In "Differentiable Blocks World: Qualitative 3D Decomposition by Rendering Primitives" the authors describe an optimization of a background icosphere, a ground plane, and multiple superquadrics. The goal is to find the shapes and textures that best explain the observations.
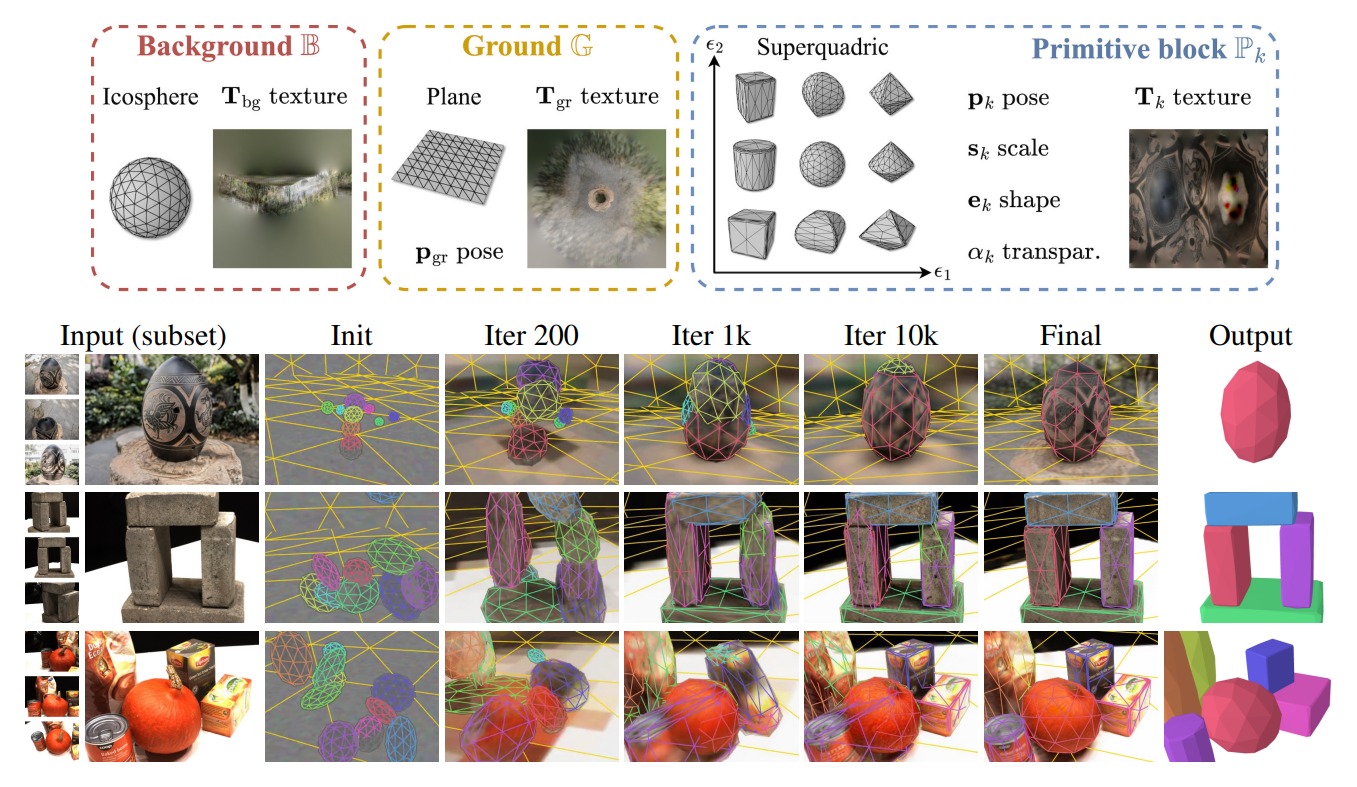
The optimization is initialized with an initial set of superquadrics ("blocks"), a ground plane, and a sphere for the background. From here, the optimization can only reduce the number of blocks, not add additional ones.
A key difference to other differentiable renderers is the addition of transparency handling. Each mesh has an opacity associated with it that is optimized. When the opacity becomes lower than a threshold the mesh is discarded in the visualization. This allows to optimize the number of meshes.
To stabilize the optimization and avoid local minima, a 3-stage optimization is employed:
- the texture resolution is reduced by a factor of 8,
- the full resolution texture is optimized, and
- transparency-based optimization is deactivated, only optimizing the opaque meshes from here.
Make sure to read the paper by Tom Monnier, Jake Austin, Angjoo Kanazawa, Alexei A. Efros, Mathieu Aubry. Interesting study of how to approach such a difficult optimization problem.